戴森视觉系统|LDS激光雷达|碰撞寻路——扫地机器人该如何选使用总结(续航|电池|耐用|系统|雷达)
-
摘要来自:
-
摘要来自:
 LaoH
LaoH -
摘要来自:2019-07-17
【什么值得买 摘要频道】下列精选内容摘自于《戴森视觉系统|LDS激光雷达|碰撞寻路——扫地机器人该如何选》的片段:
续航能力各家各型号均不太一样,不能因为LDS导航系的扫地机结构雷同就简单地说续航都一样。
irobot630 电池1700mah,续航能力1.5小时(不知道具体能扫多大);
浦桑尼克M7 电池3200mah,续航能力75min~150min(因可调节吸力强度),支持断点续航;
戴森RB01 电池5200mah,续航能力40分钟(强档),充电时间3小时以上 ,清扫面积40平方米(强档),支持断点续航。
,清扫面积40平方米(强档),支持断点续航。
irobot 980 电池1700mah,续航能力1.5小时,支持断点续航。

戴森这就牛逼!这么巨大的电池容量,这么小的续航时间,看来其强大的电机十分耗电。适合分房间清扫,或者上班后让其断点续航来清扫。
而其它品牌的机器人,基本上是不用为续航能力而担心的,毕竟你家的房子很大吗?!!
5、耐用程度
A、耗材
扫地机器人的耗材无非就是边刷、滚刷、滤网。除了戴森,其实都不用太在意,花不了多少钱。
还有就是电池,一周4次以上使用的机器人,大约1~2年就需要更换新的电池。
再次提醒,戴森扫地机任何耗材的价格都让人惊呆了。
B、机器质量
我只知道irobot真是耐操的不行。
LDS据说雷达容易坏,所以购买时候,需要了解清楚所购买的品牌售后是否完善。
·定位寻路
1、传感器和寻路定位逻辑
采用什么传感器,如何布置传感器,是由厂家设计该机器定位寻路系统时就做好的硬件配套。
A、碰撞寻路系统
所有寻路系统中,要数碰撞系统的传感器最为简单,寻路全靠撞。

不讨论早期科沃斯800元左右的碰碰车,就irobot本身的碰撞寻路系统而言是很完善的,不然不会一直从5系6系7系8系众多机型一直沿用和完善。而在使用中是明显能看出irobot并不是在乱撞,而是有大致的地图和规划。只不过每次清扫都需要碰撞试探以确认地图变化,以及难以触摸的清扫路线导致给人乱撞的感觉。
而且在碰撞试探的时候,这些边角位会进行不停重复的清扫,清扫效果较好。
不过无论算法如何厉害,只要是碰撞,就不太讨喜了,谁家十来万的黄花梨愿意给你整天撞呢?而且垃圾桶、玩具等比较轻的物品会被撞得满地跑,烦人的同时也影响效率。
B、LDS激光雷达
以浦桑尼克M7为例,一般除了配备主要的LDS激光雷达,在机器周边还会配红外传感器和沿边传感器。


激光雷达工作时会高速旋转,4.5米单次扫描半径,360次/min扫描频率非常强大。其出色的绘图能力使得清扫路径规划合理,App智能交互有更多的可控性。

C、戴森360eye视觉系统

戴森360eye视觉系统得名于其顶部的360°摄像头,据说可快速拍照识别周围环境
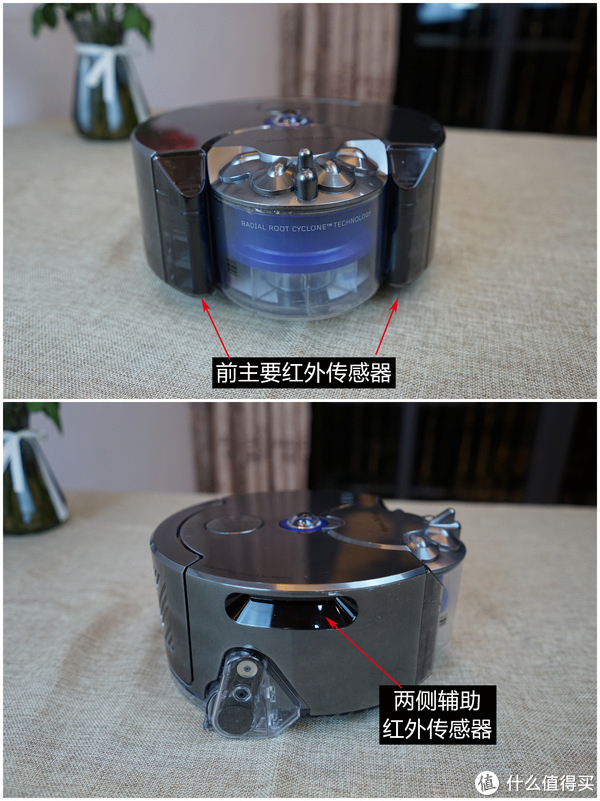
除360°摄像头外,前方两个和侧面两个红外传感器对其防撞定位起到非常重要的作用。


D、irobot 9系视觉系统

irobot采用视觉系统的机器为i7和9系全部,采用面向前方的摄像头,采用vSLAM? 视觉运算处理技术。再配合外观类似irobot630前方的红外碰撞传感器。

看官方介绍和测评,其绘图能力也十分出众。
但无论采用LDS激光雷达还是视觉系统,也是无法完全避免碰撞的。
3、悬崖传感器

悬崖传感器是每台扫地机的必配装备,一般定时清洁都不会有太大的问题。

4、灰尘传感器

灰尘传感器是irobot一直以来都装载在扫地机的原件,正是该传感器的存在,让其碰撞寻路这种看似乱撞的清扫路线,依然能达到比较满意的清洁效果。在特别脏的地方,“污垢探测”灯会亮起来,扫地机会不停在该位置重复清扫。
而装载LDS雷达的扫地机,一般不会配备该传感器,而是根据其精准的定位,将所有位置扫一遍。
5、路径规划和清扫效率
【下面提到的清扫面积跟套内面积是两个概念,套内面积145平方米的情况下去除阳台洗手间等面积,LDS导航显示清扫面积仅为60平方米】
A、碰撞寻路系统:路径规划,看不懂,但有它固定的清扫动作。清扫效率,最低,不到60平方米的清扫面积,真的要1.5小时把电池用完。
B、LDS激光导航系统:路径规划非常科学,清扫效率最高,70分钟即可完成60平方米的清扫面积。

C、戴森视觉系统:规划路径非常科学,清扫效率高,每次使用会重新绘图。因其较小的机身,清扫时,统计的清扫面积会比LDS多。

C、Irobot9系视觉系统,与LDS一样,会进行地图记忆,科学清扫。因为无亲身体验,就不评论了。但根据测评,不会比LDS差。与LDS系的扫地机相比,irobot9系因内置灰尘传感器,故清扫时除了科学规划外,还会重点照顾。
论清扫路径,LDS激光导航/视觉系统因准确的绘图,都能做到科学规划路径,不重复。
论清扫时间,相同面积下,LDS用时最短。
6、回充

回充功能是所有扫地机器人都有的功能,基本原理都是靠其定位导航系统,机器人回到充电座附近后,靠充电座的红外发射器和扫地机的红外感应器,实现精确定位,回充。

而在这方面,戴森是一朵奇葩。充电座就是一块板,只有两个充电触点,没有任何定位传感器。其App上的交互系统中,也没有所谓的回充按键,只有“回到起始位置”。根据我的观察和推测,戴森的视觉系统确实可以让机器人很精确的回到起始位置。但实现最后一步,精确接触充电触点的,靠的居然是充电面板上的黑白标记(类似汽车安装全景摄像头时候用于定位的标记)。
这设计就巧妙了,其回充准确率也极高。
·智能交互
智能交互对于一个扫地机来说,这是很有必要,即便不去特意控制也能监督查看。
就连戴森扫地机在国内这么小众,也加入了天猫精灵阵型。浦桑尼克也是天猫精灵阵型,irobot也是天猫精灵阵型。我手上居然一个小米全家桶的扫地机都没有。
智能交互方面,我先从差的说起。
1、我手上的irobot 630是什么屁阵型都没有,因为连wifi都连不了,更别说什么智能交互了。这种只活在自己世界的扫地机已经不多了。

2、戴森扫地机在智能控制方面,仅次于没有。你只能在App上"开始/暂停/回到初始位置(回充)/档位调节",以及查看清扫记录(有地图和路径)和设置清扫计划(定时)。可玩性,跟LDS激光导航系列的机器人无法比。

3、采用LDS激光导航的扫地机,在智能交互方面真是可以玩出花来,特别是小米/360等布满互联网基因扫地机。以浦桑尼克M3为例,虚拟墙设计/分区清扫/定点清扫/遥控清扫/沿边清扫/清扫记录查看等功能应有尽有,极其方便。
4、再次提一下irobot9系,其智能控制设计并不差于LDS系类机器人,甚至在边界划分方面有这更胜一筹的功能。
·虚拟墙
从irobot多年前推出扫地机器人开始,就已经有虚拟墙的概念。当然了,irobot5系6系7系8系所采用的虚拟墙都是实体配件,价格昂贵还不太好用(只能是一条直线)。
戴森没有虚拟墙的概念。
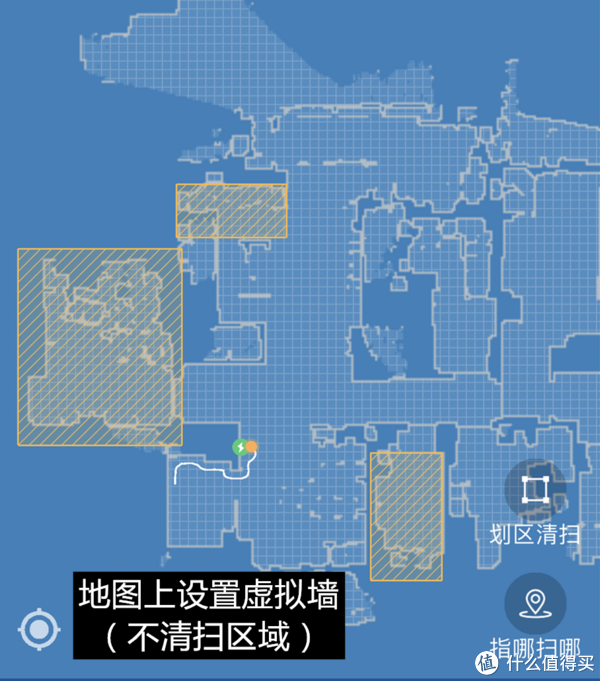
而在虚拟墙方面LDS激光雷达系的机器人有着无与伦比的优势,在探测出来的地图上随手一划,就能标出不清扫的区域。irobot9系同理,甚至有更胜一筹的小设置。
那么,虚拟墙重要吗?非常重要。

这是个儿童活动游戏区域。如果让扫地机绕开这个区域,LDS系类的扫地机只需要在地图上画一个不清扫区域,Irobot需要买2个虚拟墙配件,并且每次清扫前要放好。

没有虚拟墙,就只能选择物理防护。这给清扫造成很大的困扰,每次开机前要关厕所门/阳台门,关闭不需要清洁的房间等。
·清洁效果
林林总总说了这么多,到最后还是要说一下清洁效果。毕竟,清洁不到位的话,任你规划再好用时再短也没用。
首先,我要把戴森360Eye RB01这个奇葩拿出来单独说。
戴森凭借着其无与伦比的强大吸力和独特的气旋分离技术,确实在地面清扫方面非常厉害。









