石头 扫地机器人使用体验(传感器|水盒|拖布|模式|清扫)
-
摘要来自:
-
摘要来自:
 梦想是个猪
梦想是个猪 -
摘要来自:2019-09-10
【什么值得买 摘要频道】下列精选内容摘自于《这可能是史上最详细的石头 Roborock 石头 扫地机器人评测》的片段:
这是目前在用的三台扫地机器人,最左边是一台非常古老的科沃斯随机清扫型,廉颇老矣,不能再饭了;中间这一台就是石头扫地机器人;右边的是同为石头科技旗下的小瓦扫地机器人规划版。
节能洗和超快洗,适合轻油污的碗筷,但前者的3个小时,确实是太长了。

从这张图可以看出,同出一门的石头和小瓦设计风格非常接近,只是小瓦没有使用石头的LDS激光测距传感器,而是采用了双陀螺仪惯性导航系统融合高精度双光学运动追踪传感器,从工作原理上讲,石头的LDS激光测距传感器工作得更加精准。

两个品牌的充电底座外观一模一样。

但是小瓦扫地机器人的集尘盒为640ML,明显大于石头扫地机器人的480ML。这两款机器都采用了FIP级密封尘盒设计,配合大面积E11等级可水洗滤网,可以做到在工作时过滤脏物的同时吹出洁净空气,杜绝二次污染。

两款机器的拖布和水盒也是一模一样,可以互换。



从侧面看,两款机器的高度基本上是一致的。

但是经过实际测量,因为小瓦扫地机器人的全方向回冲感应器凸出高度比石头扫地机器人的LDS激光测距传感器凸出高度要小一些,所以理论上讲,小瓦可以进入到90MM高度的空间,而石头只能进入100MM高度的空间。
在实际使用中也发现,小瓦能进去的位置,石头不一定能进去。




石头扫地机器人采用的是前扫后拖模式,启动机器后,主机自动扫描生成地图并智能分区,在分区范围内采用先沿墙清扫,之后Z字形填充的方式规划清扫路径,逐一完成各个分区的清扫,这种方式基本上能做到高效有序不容易出现漏扫情况。
也可以启动机器进行局部清扫,机器能在以自身为中心的1.5*1.5米范围内进行工作。
在持续的使用中可以发现,如果家中没有过多的障碍物,石头扫地机器人清扫的洁净度非常高,除非是顽固的污渍,底板上可见的碎屑、毛发、轻微污渍基本上都能清扫得干净。


石头扫地机器人所采用的植物仿生学湿拖系统,在木地板上工作时,可以看到,地板上仅仅只有轻微的水迹,而且很快就被蒸发掉了,这点水迹并不会对木地板有明显的影响。






在清扫完成后,机器人会自动回冲,经过多次测试,石头都能很容易就找到充电座并进行充电,但是有一点需要注意的是,充电座左右两侧和前方需要留出一定的空间。



从APP上可以看出石头的清扫轨迹,在没有障碍物的情况下,机器人的行驶路线非常平直,一旦感应到障碍物,机器人就会沿着障碍物绕过去,值得一提的是,这台扫地机器人在同一次清扫中如果感应到障碍物并且成功的绕过后,再一次来到这个障碍物旁边时就会自动绕过,而不会出现第二次碰撞试探。


满电情况下,机器设置为MAX模式,一次完整的清扫,共完成清扫面积42平方米,电量从100%下降到58%,总计清扫时间54分钟,
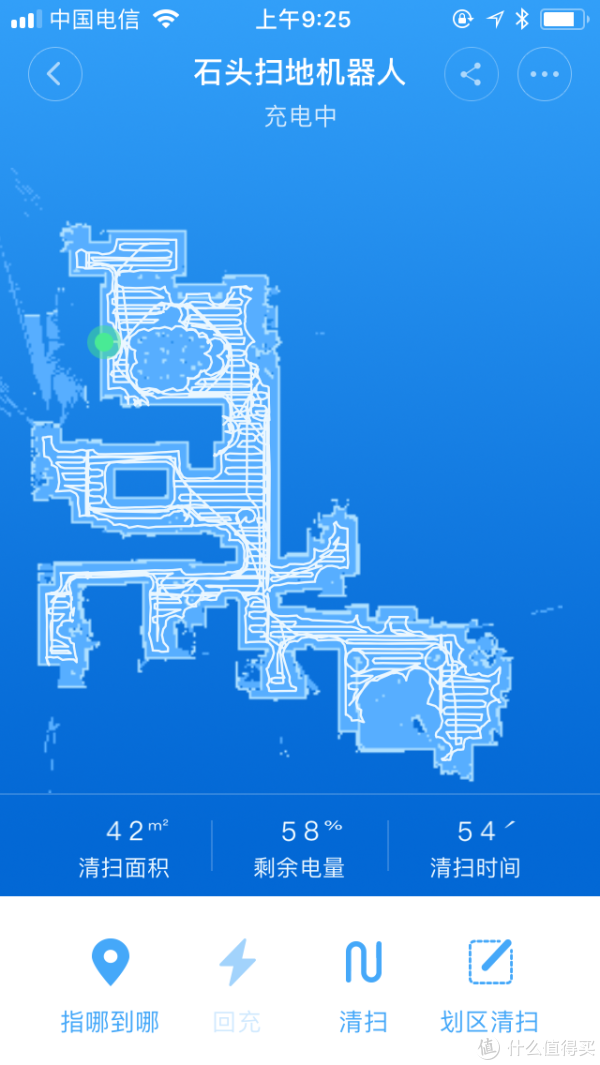

机器的充电功率为30.77W,对于机器内置的5200MAH大容量电池来说,这个充电功率是完全可以接受的。相对来说,小瓦扫地机器人的2600MAH电池在实际使用中偶尔会出现电量不够用的情况。

石头扫地机器人的吸力高达2000Pa,如此高的大吸力是需要高速运转的风扇才能支撑得起的,而高速运转的风扇随之而来的问题就是大噪音。
那么这台机器人的实际工作噪音到底有多大呢?经过近距离实测,在环境噪音为53.9DB时,机器设置为安静模式时,实测出风口附近噪音为78.6DB。


而机器设置为标准模式时,出风口附近噪音达到了81.9DB。

当将机器设置为强力模式和MAX模式的,出分口附近噪音达到了86.6DB和89.1DB。当然,这个测试的数据是机器出风口处的近距离测试,实际使用中,人耳并不会如此近距离的接触机器。
如果对机器发出的声音比较敏感,建议采用定时清扫模式,选择在外出家中无人时让机器自动工作。


拆解——一探究竟
相对于其他家用小电器来说,扫地机器人的工作环境其实是比较恶劣的,在工作中,机器人随时都要和灰尘、碎屑、毛发、杂物打交道,还要随时面对地面上可能出现的各种污渍,尤其是这种扫拖一体机,还随时要带着水箱到处跑。
另外机器人在工作时,伴随而来的是各种震动、碰撞,以及机器自身风机的高转速所造成的共振。
种种复杂的环境,注定了扫地机器人需要经常进行维护和自身的清理,在此之前,曾经拆机维护过多台扫地机器人,对这种产品内部复杂的结构是有较深的体会的。
所以决定拆解这台机器,看看其内部设计到底有什么不同之处。

这台机器其实很好拆解,拆下底板上的几颗螺丝后,就可以轻松取下底板看到内置的电池、主刷组件、行驶轮组件。

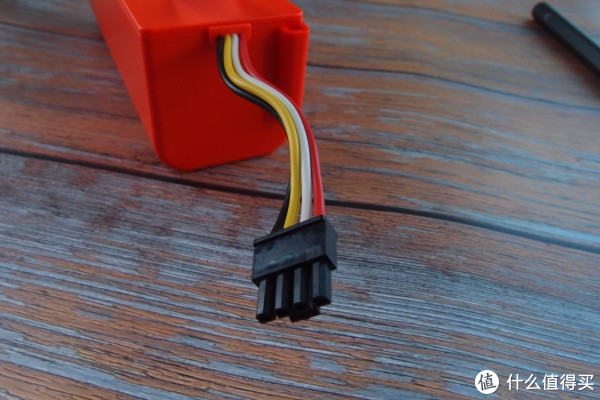
5200MAH的大容量锂离子电池,额定电压14.4V,充电限制电压16.8V,电池的生产厂家为德赛电池有限公司,德赛产品在国内的市场份额还算不错。
电池通过四线接插件连接在机器主板上。

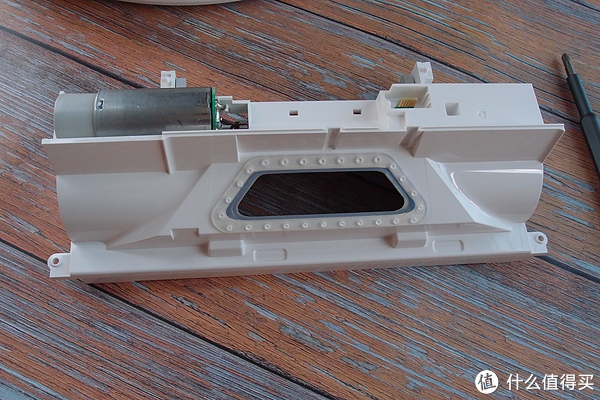
拆下电池后,即可拆下主刷组件,主刷组件包含有一个电机,通过接插件连接在机器主板上。对于一台扫地机器人来说,主刷往往是最容易被毛发缠绕的地方,在工作中,主刷一旦被缠绕卡死,就容易引起电机过热而损坏,因此需要经常清理主刷上缠绕的各种异物,保持主刷干净。




两个行驶轮组,也是通过同样的接插件连接到主板上,每个轮组里面各有一台电机。这种零部件的模块化设计,对于后期的维护和维修来说会很便捷,只需要打开底板,将损坏的部件拆出更换即可。在之前拆过的一些较老款的扫地机器人中,基本没有采用这种模块化的设计,因此维修起来较为困难。



边刷组件,一台较小的直流电机通过减速齿轮盒带动边刷进行工作,按照官方建议,边刷需要至少每一个月清理一次,清理边刷时,可以直接将边刷固定螺丝拆下即可,不需要拆出整个驱动模组,为了保证更好的清扫效果,边刷需要3-6个月更换一次。
对于扫地机器人来说,主刷、边刷、集尘盒滤芯、拖布、水箱过滤组件都是消耗品,在使用过程中需要定期更换。



拆除掉所有的电机驱动模组后,就可以拆下碰撞缓冲器部分了,一块半圆形的保护盖下隐藏了两个碰撞轻触开关,原理很简单,就是通过杠杆原理导通和关闭光信号来识别是否撞击到障碍物。


沿墙传感器已经从夏普的红外测距改成意法半导体的雷射模块。相比于红外测距模块,意法半导体的雷射感器可以实现毫米级精准测距,从而实现机器人在清扫墙边时和墙保持合适的距离。









