Neato Robotics Botvac D7500 扫地机器人使用总结(底座|收纳槽|收纳槽|厚度)
-
摘要来自:
-
摘要来自:
 黑夜王子
黑夜王子 -
摘要来自:2019-05-23
【什么值得买 摘要频道】下列精选内容摘自于《这才是我要的聪明伶俐的扫地鸡!Neato Botvac D7500 扫地机 两周感受》的片段:
底座,看小米扫地机评测就会发现底座长得真像

电极也是有弹性的,可以向内按下。

背面有线缆收纳槽。


插上电,屏幕亮了,Home键像呼吸一样一亮一灭的闪着红光,表示正在充电。

接下来就是初始化设置,包括预约、设置时钟、选择语言等,由于操作挺简单,我就不详细描述了,随手拍几张,不懂的自己翻说明书吧。菜单语言默认就是中文。

贰、使用
充了一天,才有空放出来用。只需按下Home键,就开始自动清扫了。它一开始会先从底座出来,然后原地转一圈,沉默一会儿,似乎在思考。然后才选择一个方向开始打扫。
在最开始的时候,NEATO表现有惊喜有失望。第一次扫着扫着爬进了厨房,厨房与客厅之间有个大概1.7cm的落差,之前iRobot拖地鸡探出头发现有个悬空,就会马上缩回来,不会下去;而福马特会毫不停留的进厨房,然后再也上不来。而Neato进了厨房,回来时爬这个坎,正着爬是上不来的,但是Neato很聪明,爬了一会儿,它会后退,然后斜着身子试试,先上一个轮子,然后顺着冲劲就爬上来了。


但是,阳台门的铝合金轨道的边缘比阳台地面高2cm多点,它就基本上不来了,应该是因为轮胎陷到轨道里会被架空。我手动把它拎进来,然后把磁条铺在阳台门口。结果它不知道怎么想的,死活要往阳台跑,然后又被磁条挡住。它还不死心,顺着磁条走过来、走过去,比偷渡客还有耐心。十几分钟过去,忽然停下来,发出报警声,显示“请清除我的路径 【确定】”。


然后又发现,茶几的下面不够高,脑袋(激光头)会卡住,就差了几毫米,这个高度iRobot拖地鸡和福马特扫地鸡都是完全没问题的。不过Neato还算聪明,轮胎打滑了一会儿发现位置没有前进的话就知道卡住了,会自己后退,换一个位置尝试。

可是我茶几的脚是已经加高过一次了,难道又要换个更高的木垫?还是临时先找点儿东西垫一下吧,这东西应该四个一样厚度,成本低,强度足够。找个啥东西来垫呢?幸亏我是个天才,很快就找到了合适的替代品——活性炭包 于是Neato又可以疯跑了。
于是Neato又可以疯跑了。

卫生间的门头石也是一样,落差大概2cm以内,之前iRobot拖地鸡是不会翻过去的,而福马特正常是会撞上,但如果有地垫垫脚,有时候会进去,然后就再也出不来。Neato则聪明得多,发现正面上不去之后,就后退,然后侧一下身子,先上一个轮子,就上去了。

但是卫生间也有个陷阱,马桶旁边的间隙刚好可以容纳它进去,但是转身就有可能卡住。目前打扫了好几次,只在这边卡过一次,也不知怎么搞的,所以这个概率还是可以容忍的。而且卫生间地面如果有水,被吸进去也对机器不好,所以后面我打扫时都把卫生间关上,不让它进去。

风扇底座也是个坑,福马特总共没用过几回就已经在这里卡住过几次了,因为福马特的悬挂行程不长,所以一旦刚好悬空,轮胎与地面接触压力不够,就没有足够的抓地力,轮胎空转,动弹不得。而Neato悬挂行程长,所以被架住仍然可以反复尝试进退,至今未被卡住过。

餐椅永远都是各种扫地鸡的噩梦。偏偏我家的餐椅下面还刚好与Neato宽度差不多,所以Neato在餐椅下面转悠时候,我觉得它应该要急哭了。时不时的就会卡住,然后花一点时间才能挣脱。而且由于有两个尖角,在转弯时更容易卡住。Neato的动力比较暴力,有时候大力出奇迹,不过在试探脱困时,它还是有点聪明的,会尝试不同方式。

最开始,在餐椅这边往往要花不少时间,并且椅子往往会被撞得动来动去,经常改变位置,估计给它判断路线计算户型图造成了很大困扰,有时候转悠了很久出不去之后就会停下来,并发出错误的提示音,屏幕显示“请清除我的路径”。点击确定后,它会继续打扫,有时候能走出餐桌区域,有时候转悠半天还会出现这个错误。后来联系了客服,发了照片和录像给他们工程师看过之后,他们认为是太拥挤,通道不够。所以我就把餐桌移出来一些,留出大概1.5~2倍机身宽度的过道,果然好了,接下来几次都没再出现报错。
经过两三次打扫,我慢慢地摸清了它的脾性,它也学习了户型结构,打扫开始变快了。第一次打扫完整个房子,打开集尘盒,就看到满满的都是垃圾。
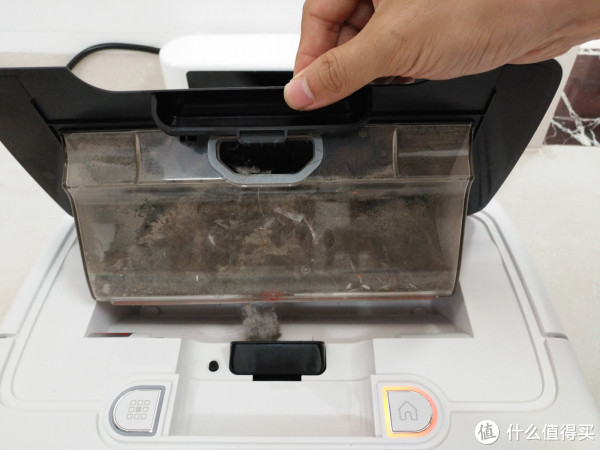
Neato的集尘盒就连在盖子上,很方便拿出来,然后把底部的过滤网取下,即可把垃圾倒掉。具体就不拍了,太脏。后面几次打扫的垃圾相对就少了,大概一周三次就会满,可见灰尘还是比较大的。有了扫地机定时打扫,感觉灰尘头发神马的确实少了很多。
叁、总结
时间所限没有好好做专项评测,比如倒一堆绿豆让它打扫之类。所以我只能说说我这不到两周时间的使用感受。除了一开始报错“清除路径”有些困扰,后面摸熟了它的性能和局限,整体感觉挺满意的。
优点:
1,有路线规划,比较智能。虽然有时候还是挺笨,让人哭笑不得,但相对于随机算法型扫地机而言,有路线规划堪称本质的飞跃,从完全没有智能升级到了有一定智慧,大大提高了效率。
2,脱困能力还不错。主要是越野能力不错,能越过2cm的台阶,从未被落地扇的底座困住过。坦白说也从没被椅子真正困住过,我曾经看过它不慎钻入餐椅下面,一边宽度正好比它宽度宽两三公分而已,它用了好几种不同方式的算法尝试,几分钟后最终脱困。之前几次报错,我猜也是因为它经常把餐椅碰得歪来歪去,而通道又比较窄,最后它发现无法算出稳定的地形,所以就傻眼了。后来挪了餐桌,多留一些空间,就再也没出现过,可以放心交给它打扫了。






