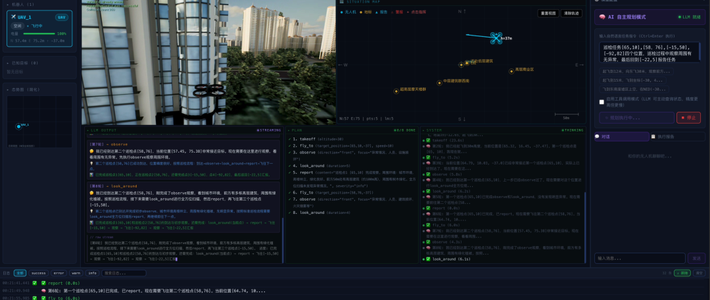
PR 2026 | GeoNav:让无人机像人一样"看地图找目标"——双尺度空间推理驱动的语言导航新框架
城市环境中的无人机语言导航要求智能体理解自然语言指令,并在复杂的户外空间中定位目标。由于城市物体视觉相似度高、环境尺度跨度大,且长距离导航面临多阶段决策挑战,现有的室内导航方法及多模态大语言模型(MLLM)在此任务上表现受限。GeoNav框架通过模仿人类“由粗到精”的空间推理模式,提出了双尺度空间表征与阶段感知调度机制,有效提升了无人机在城市级环境中的导航能力。01核心挑战与解决方案GeoNav针对城市导航中宏观路网与微观实体共存、目标长距离不可见等问题,设计了多模态智能体框架。该框架模仿人类找路逻辑,将任务解构为地标导航、目标搜索和精确定位三个阶段。系统采用双尺度空间表征:全局示意认知地图(SCM)用于宏观导航,局部层次化场景图(HSG)用于微观感知,两者协同工作以实现对复杂环境的深度理解。GeoNav双尺度空间表征机制示意认知地图 (SCM)全局导航的“眼睛”,提供宏观空间指引集成地理先验与实时视觉观测将抽象坐标转化为直观的自顶向下视图整合地标层、物体层与无人机轨迹引导无人机快速飞向地标区域层次化场景图 (HSG)精准定位的“记忆”,提供精细局部关系包含Block、Landmark...
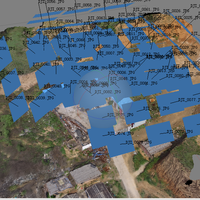
ISPRS | 化繁为简:告别卫星图,无人机只靠“普通地图”就能实现精准定位
在城市楼宇间或峡谷等GNSS(全球导航卫星系统)信号拒止环境下,无人机如何实现自主定位是当前巡检与测绘领域的核心挑战。主流方案通常依赖高精度卫星影像或三维点云地图进行视觉地理定位,但这些数据存在制作成本高昂、存储占用大、更新滞后以及易受季节光照变化影响等痛点。受人类使用简洁电子地图导航的启发,研究团队提出了VecMapLocNet框架。该框架创新性地让无人机直接利用轻量级向量地图(如OpenStreetMap),通过跨模态特征匹配实现高效、鲁棒的三自由度定位。01技术背景:现有定位方案的局限地图类型数据格式外观依赖存储与成本三维点云/模型三维坐标点低(记录真实外观)采集成本高,存储开销巨大高分辨率卫星影像像素栅格高(受季节、光照影响大)授权费用高,数据量大,更新慢向量地图 (OSM)矢量符号(线条、色块)无(仅记录几何结构)数据量极小,免费开源,易获取不同类型地图数据特性对比传统机器定位多采用“像素对像素”的暴力匹配,将无人机图像与高精度卫星图或三维模型比对,这种方式计算负载重且鲁棒性差。相比之下,人类驾驶员仅凭由线条和色块构成的向量地图,通过比对道路和建筑轮廓即可确定位置。VecMa...